

代码拉取完成,页面将自动刷新
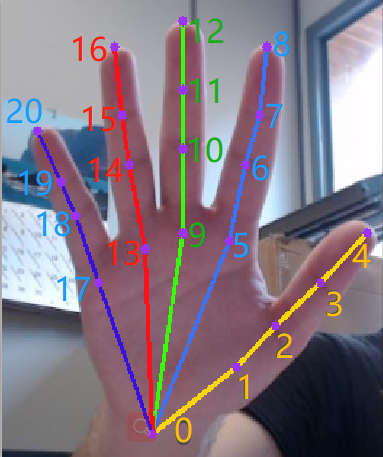
手势 21 个关键点检测
注意:该项目不包括手部检测部分,手部检测项目地址:https://gitcode.net/EricLee/yolo_v3
该项目是对手的21个关键点进行检测,示例如下 :
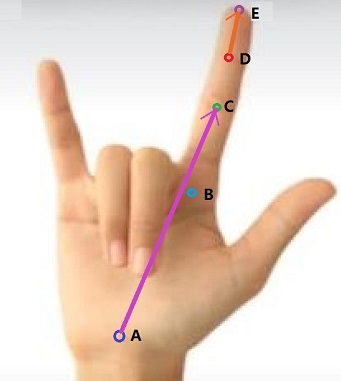
示例1 - 按键操作
因为考虑到目前没有三维姿态不好识别按键按下三维动作,所以目前采用二维方式。
该示例的原理:通过简单的IOU跟踪,对二维目标如手的边界框或是特定手指的较长时间位置稳定性判断确定触发按键动作的时刻,用特定指尖的二维坐标确定触发位置。
(注意:目前示例并未添加到工程,后期整理后会进行发布,只是一个样例,同时希望同学们自己尝试写自己基于该项目的小应用。)
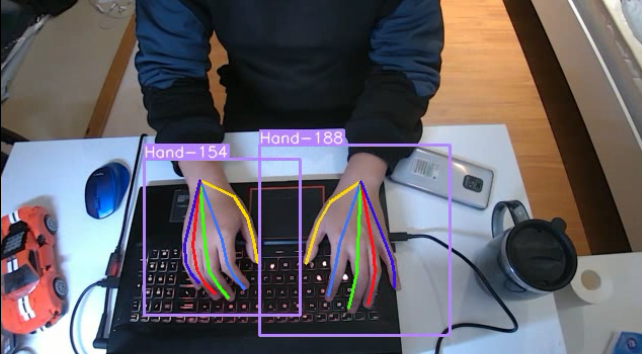
示例2 - 手势交互:指定区域物体识别
该示例的出发点是希望通过手势指定用户想要识别的物体。那么就要选中物体的准确边界框才能达到理想识别效果。如果待识别目标边界框太大会引入背景干扰,太小又会时目标特征不完全。所以希望通过手势指定较准确的目标边界框。因为边界框涉及左上、右下两个二维坐标,所以通过两只手的特定指尖来确定。且触发逻辑与示例1相同。
该示例的原理:通过简单的IOU跟踪,对二维目标如手的边界框或是特定手指的较长时间位置稳定性判断确定触发按键动作的时刻,用特定指尖的二维坐标确定触发位置。
(注意:目前示例并未添加到工程,后期整理后会进行发布,只是一个样例,同时希望同学们自己尝试写自己基于该项目的小应用。)
该示例依赖于另外一个物体识别分类项目。
该物体识别分类项目的地址为: https://gitcode.net/EricLee/classification
视频示例如下图:
示例4 - 静态手势交互(识别)
通过手关键点的二维角度约束关系定义静态手势。
该项目通过手势操作选择分类识别区域或是ocr识别区域,送入分类识别网络或是第三方web识别服务,亦或是检索数据库等应用。
原理:通过二维约束获得静态手势,该示例是通过 食指伸直(one) 和 握拳(fist)分别代表范围选择和清空选择区域。
建议最好还是通过分类模型做静态手势识别鲁棒和准确高,目前局限于静态手势训练集的问题用二维约束关系定义静态手势替代。

该数据集包括网络图片及数据集<<Large-scale Multiview 3D Hand Pose Dataset>>筛选动作重复度低的部分图片,进行制作(如有侵权请联系删除),共49062个样本。
<<Large-scale Multiview 3D Hand Pose Dataset>>数据集,其官网地址 http://www.rovit.ua.es/dataset/mhpdataset/
感谢《Large-scale Multiview 3D Hand Pose Dataset》数据集贡献者:Francisco Gomez-Donoso, Sergio Orts-Escolano, and Miguel Cazorla. "Large-scale Multiview 3D Hand Pose Dataset". ArXiv e-prints 1707.03742, July 2017.
标注文件示例:
如果使用该数据集并发布相关项目或网络资源文章等,请讲述其数据集的出处 "https://gitcode.net/EricLee/handpose_x"
数据集读取脚本为:read_datasets.py,并需要相应更改脚本中的数据集路径。
注意:
1> 该数据集包括网络图片进行制作(如有侵权请联系删除),
2> 项目使用该数据集请注明出处:
项目:https://gitcode.net/EricLee/handpose_x
作者:Eric.Lee

检测手bbox后,进行以下的预处理,crop手图片送入手关键点模型进行推理,
可以参考 hand_data_iter/datasets.py,数据增强的样本预处理代码部分,
关键代码如下:
img 为原图 ,np为numpy
x_min,y_min,x_max,y_max,score = bbox
w_ = max(abs(x_max-x_min),abs(y_max-y_min))
w_ = w_*1.1
x_mid = (x_max+x_min)/2
y_mid = (y_max+y_min)/2
x1,y1,x2,y2 = int(x_mid-w_/2),int(y_mid-w_/2),int(x_mid+w_/2),int(y_mid+w_/2)
x1 = np.clip(x1,0,img.shape[1]-1)
x2 = np.clip(x2,0,img.shape[1]-1)
y1 = np.clip(y1,0,img.shape[0]-1)
y2 = np.clip(y2,0,img.shape[0]-1)
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。







